




FB284管脚、111报文、EPOS功能间的对应关系,如图5/6所示。
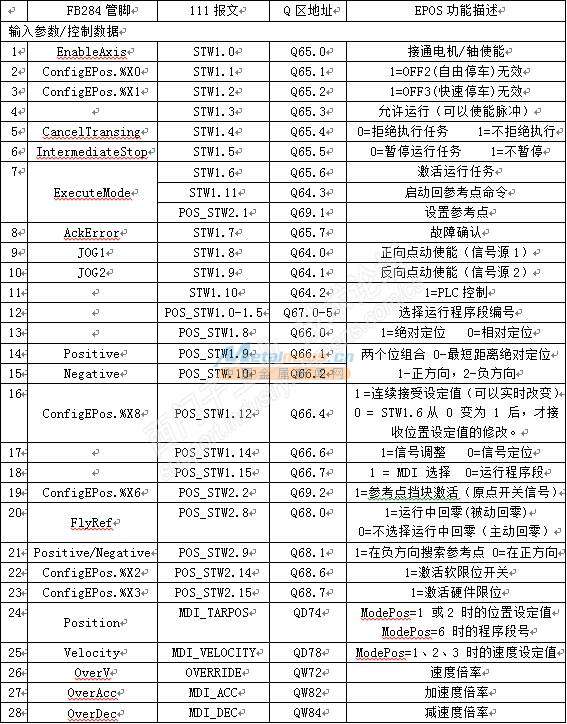
图5:控制输出对应关系
 图6:状态反馈对应关系
图6:状态反馈对应关系
3.EPOS各功能配合111报文控制V90PN的具体步骤
(1)一致性读写
前面说过通过DPWD/DAT和DPWR_DAT指令实现,如图7所示。
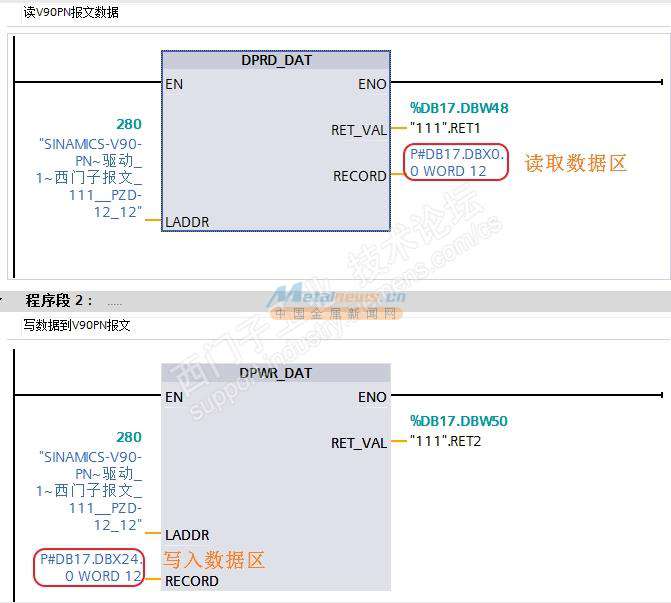
图7:一致性读取指令
(2)轴使能
伺服各种运动模式运行的前提就是先使能接通电机,这里就要提到大家耳熟能详的16#047E和16#047F了。大家用西门子G120包括V20变频器都很清楚这是停止(OFF1)和正转启动控制字,再加上速度给定就可以启停运行了。同样基于SINAMICS平台的V90PN伺服也是如此,区别就是伺服轴需要激活不同的运行任务,所以STW1.6一开始是0,由后面具体任务控制。这样V90轴使能就是把16#047E/16#047F控制字里的第6位改为0,也就是16#043E/16#043F。当然驱动器断电后再上电也需要先赋值停止控制字才能转入启动,轴使能程序如图8所示。
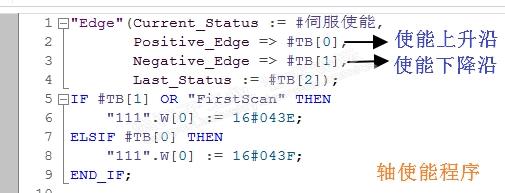
图8:轴使能
(3)设定值和反馈值
位置设定值单位是LU,速度的设定值是1000LU/分钟,111报文的OverV控制字10进制整数16384(十六进制16#4000)对应100%的速度设定值,最大设定速度是十进制32767(对应200%)。而实际速度(反馈值)因为是双字,所以十六进制的40000000H 对应100%的速度基准值(P2000的参数值),实际速度值处理程序如下所示。
#Vel_act.%W0 := "111".R[8];
#Vel_act.%W1 := "111".R[7];
#TR[0] := DINT_TO_REAL(#Vel_act);
#TR[1] :=#参考转速 *(#TR[0] / 1073741824); //16#40000000H//
#当前速度 := REAL_TO_DINT(#TR[1]);
