感觉,该窗口非常简洁的描述了硬件连接图示,PTO信号、启动命令给驱动器,驱动器再启动电机,驱动器反馈这些基本的步进、伺服控制方式。
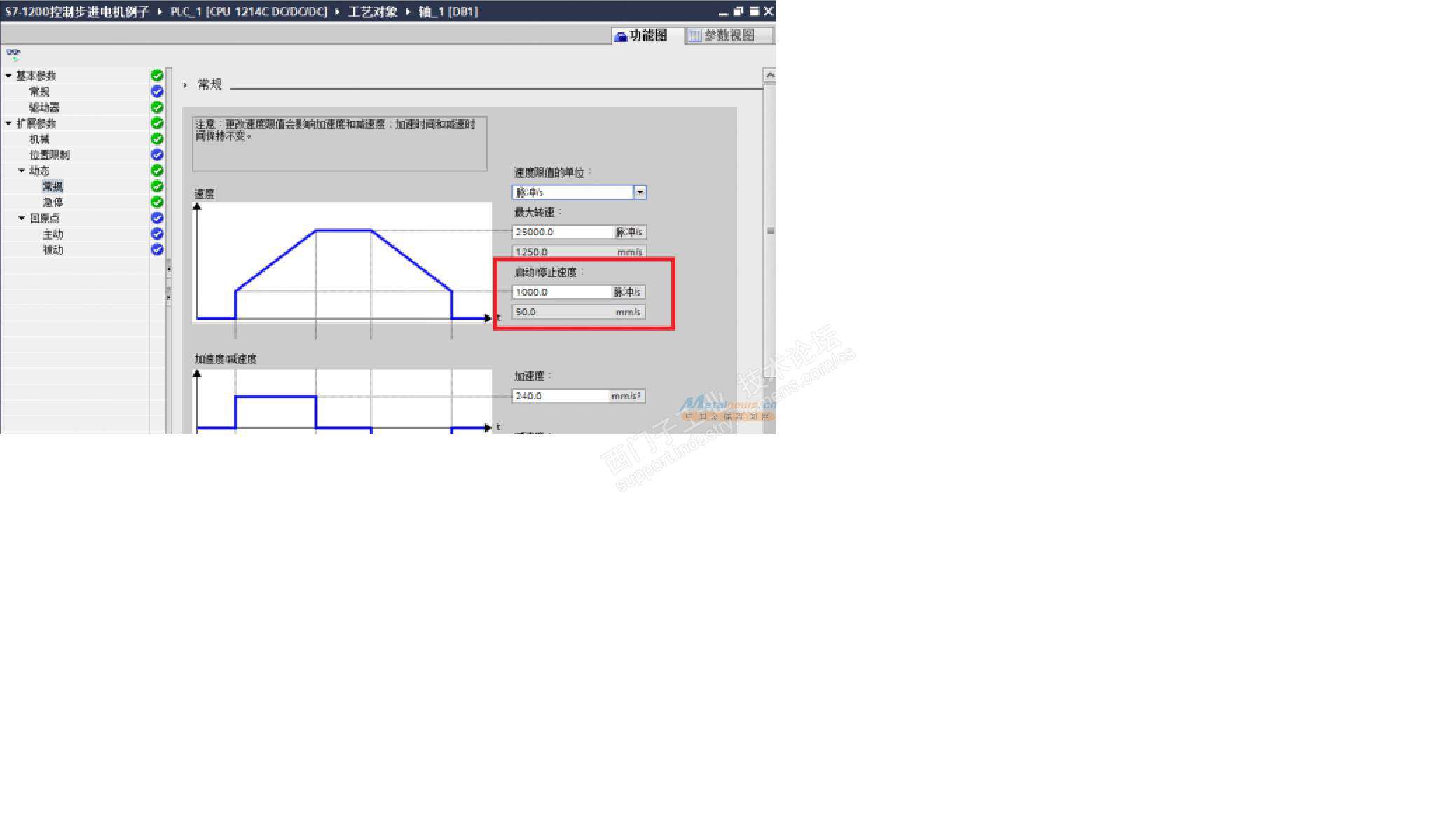
4) 根据具体的步进电机特性,1.8°/脉冲,相当于步进电机旋转一周(360°)需要200个脉冲的基本信息,在“机械”窗口选择,其它因为没有导轨丝杆,不再做其它选择:

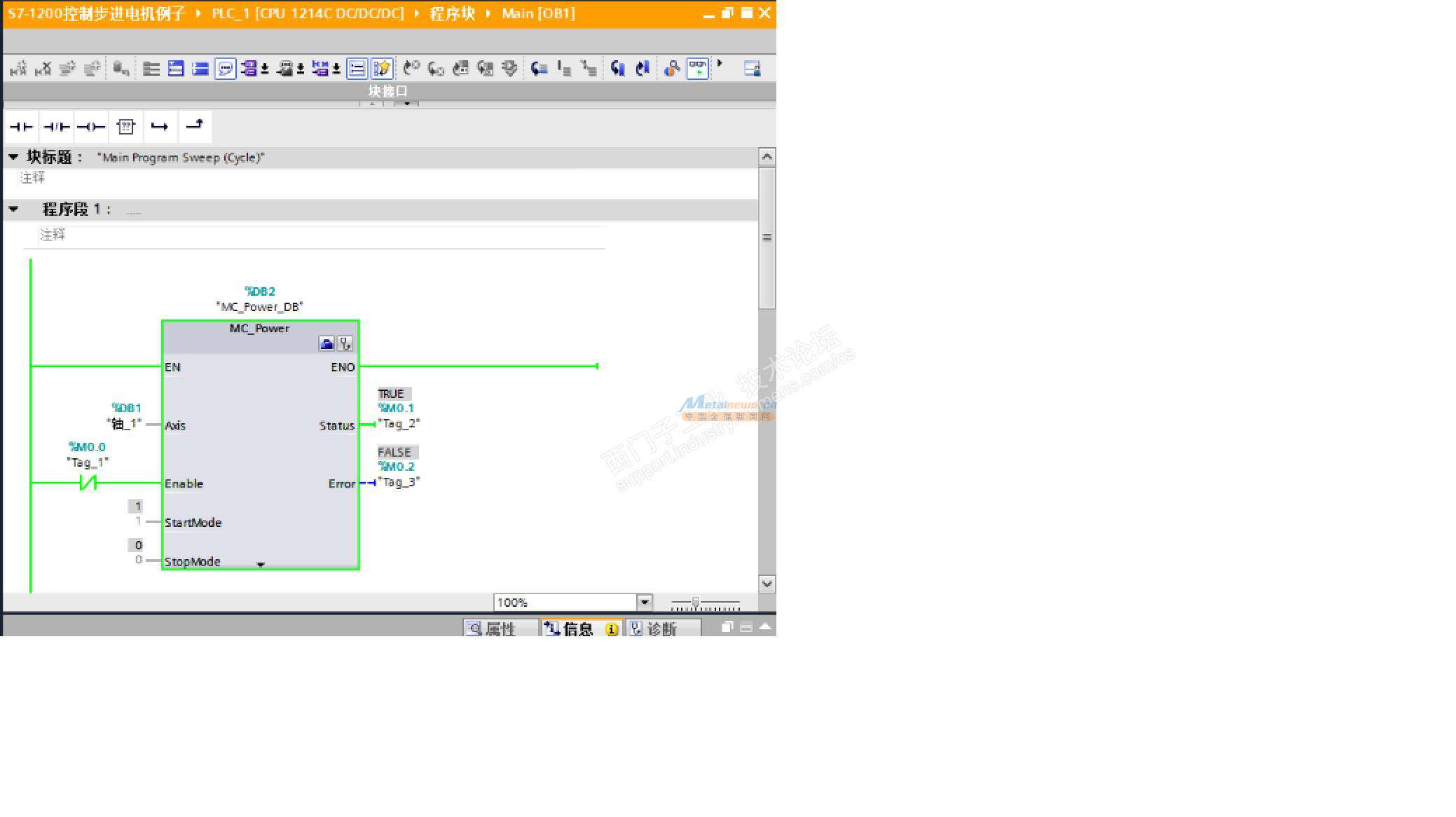
5) 因为仅仅只做一些简单的步进电机旋转测试,也没有继续忘下设置其它参数了。返回到编程界面,在OB1组织块中,把MC_POWER指令拖拽到编辑区,背景数据块(默认):
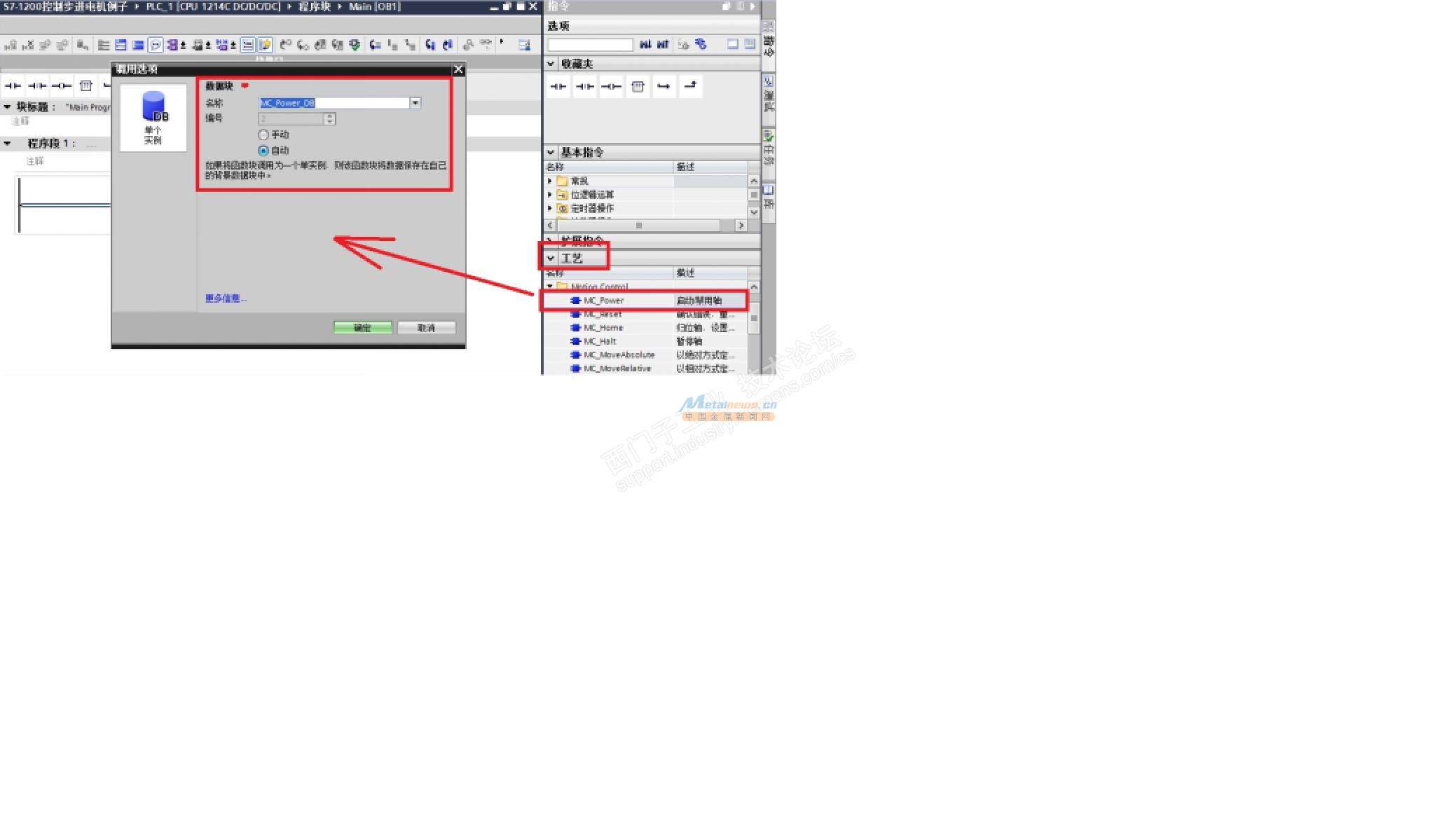
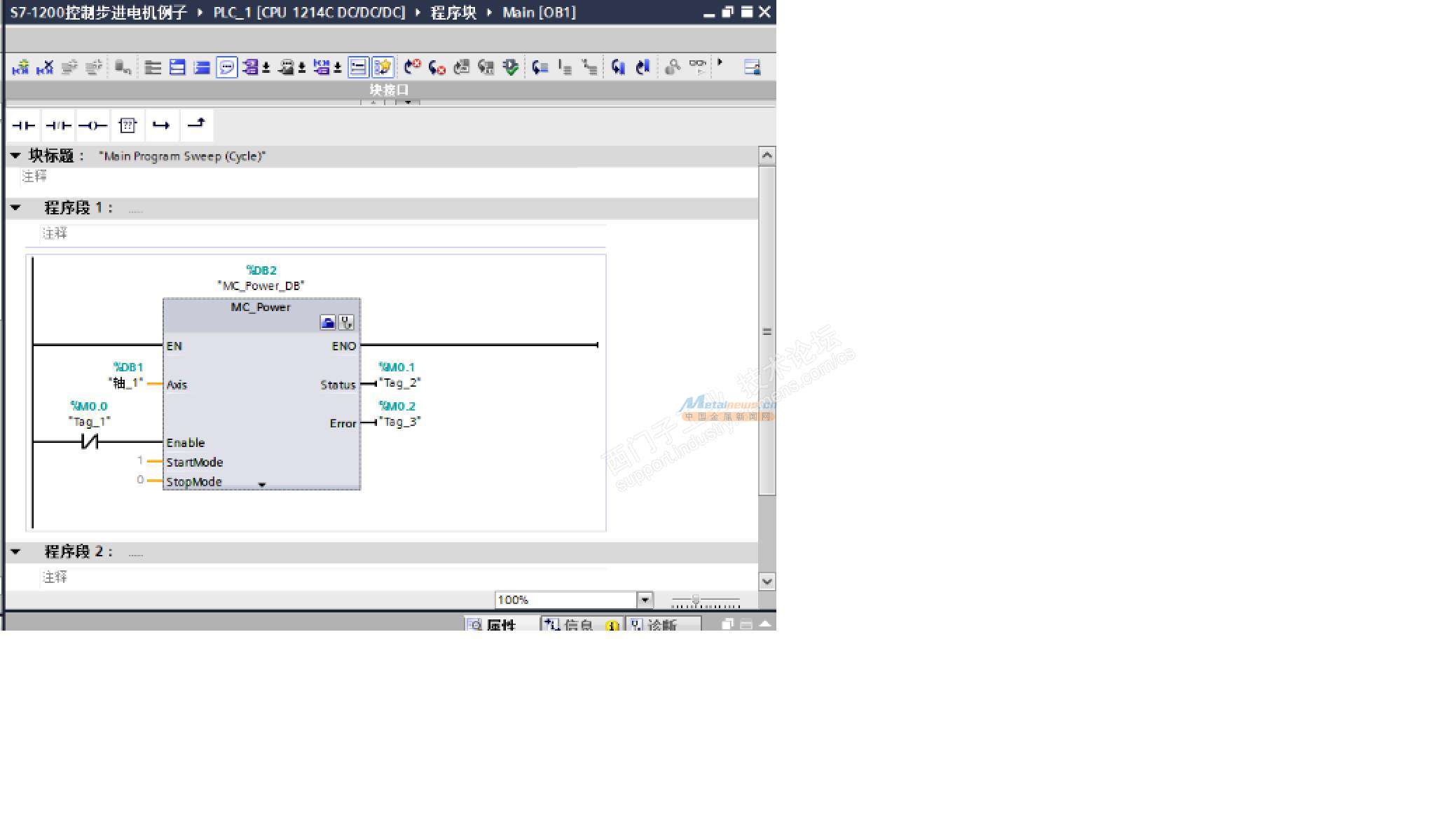
6) “确定”后,填写MC_POWER各管脚,如果对各管脚数据类型及含义不清楚的,按“F1”帮助基本能够搞定这些管脚参数了:
该指令主要是Axie、StartMode、StopMode这些管脚的赋参数。
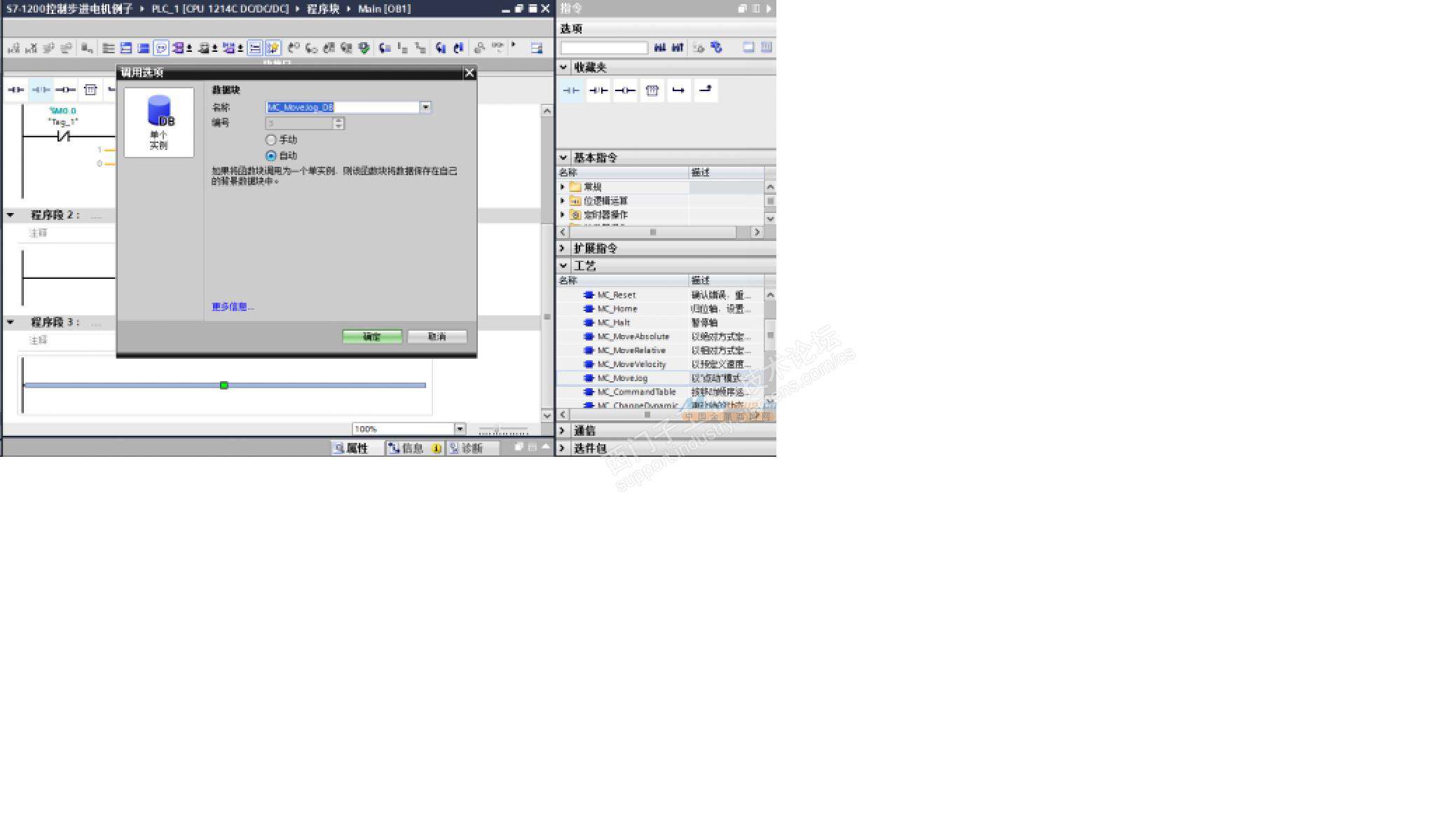
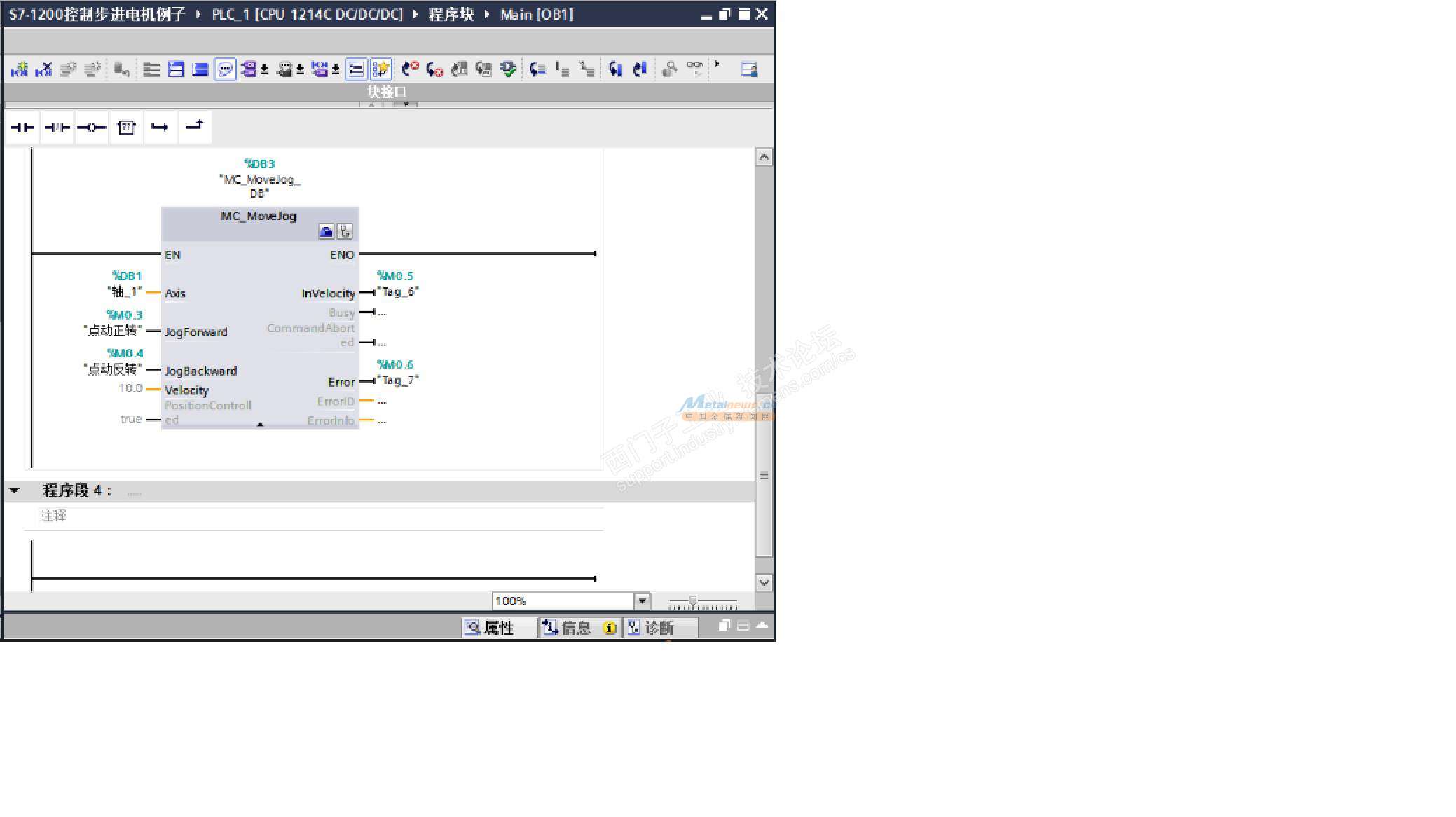
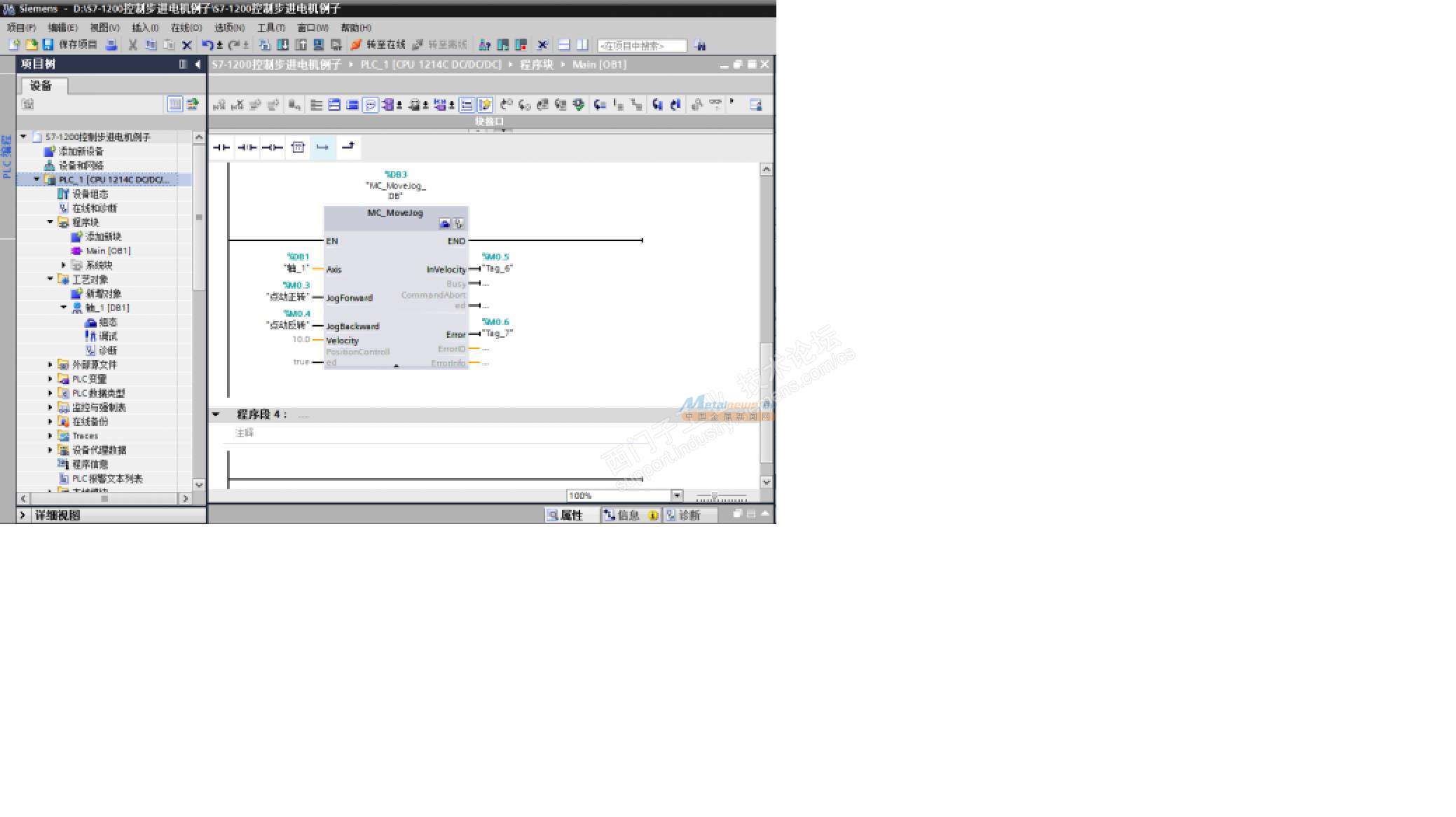
7) 因为验证实际上没有导轨和丝杆,只能是让步进电机作正、反转动,调用点动指令比较贴切一点,继续到“指令”中拖拽MC_MovJog指令到编辑区:背景数据(默认)
8) 测试项目,也不想连接实际硬件,就取M0.3为点动的正转,M0.4为点动的反转:
9) 好,简单的编程就这样了,可以测试一下程序及外部连接是否正确了,下载硬件及程序:
10) 步进驱动器使能正常,图示:
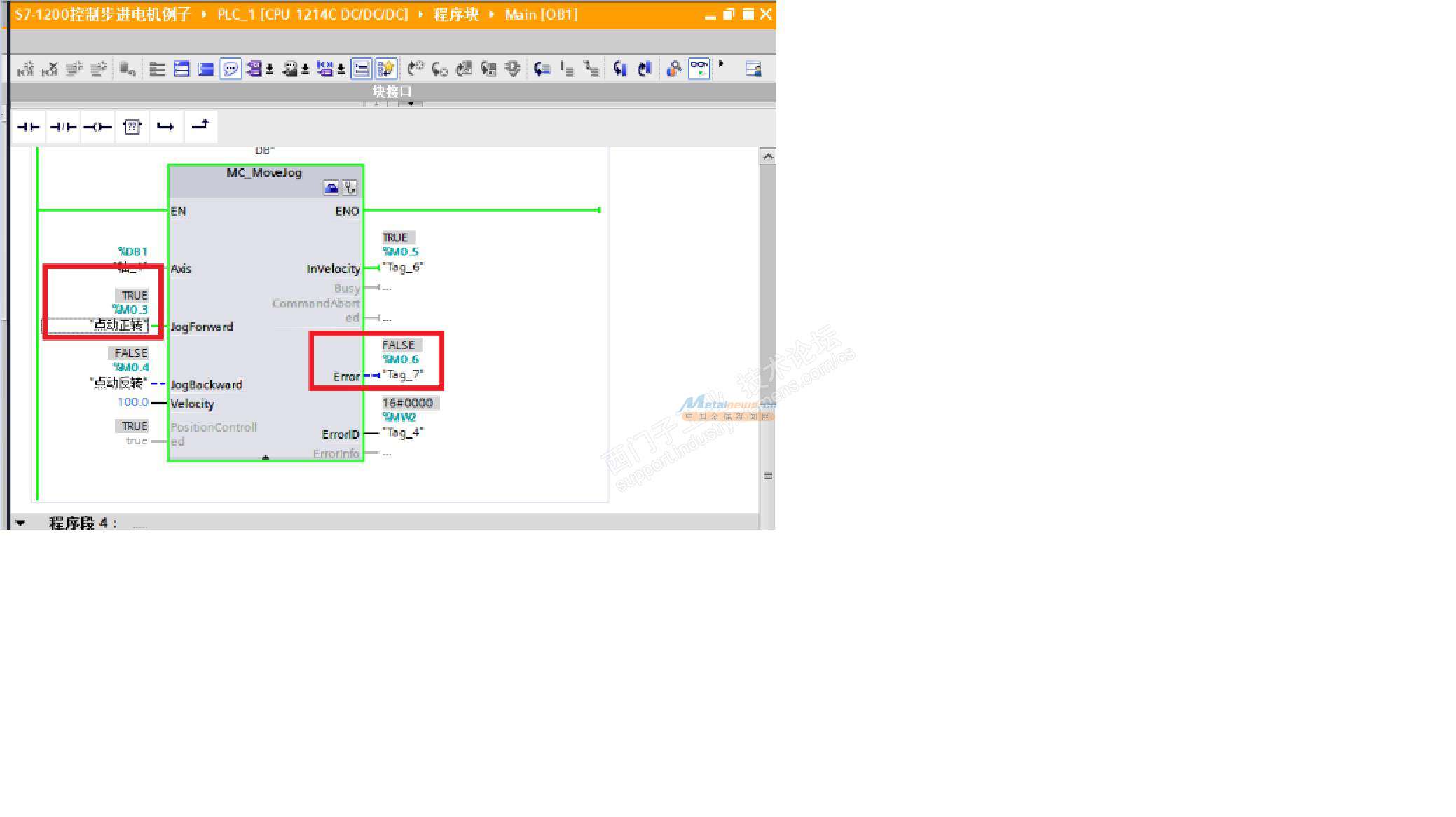
11) Veloctiy管脚(默认为10.0)点动速度不变,给M0.3/M0.4分别使能,看输出情况:
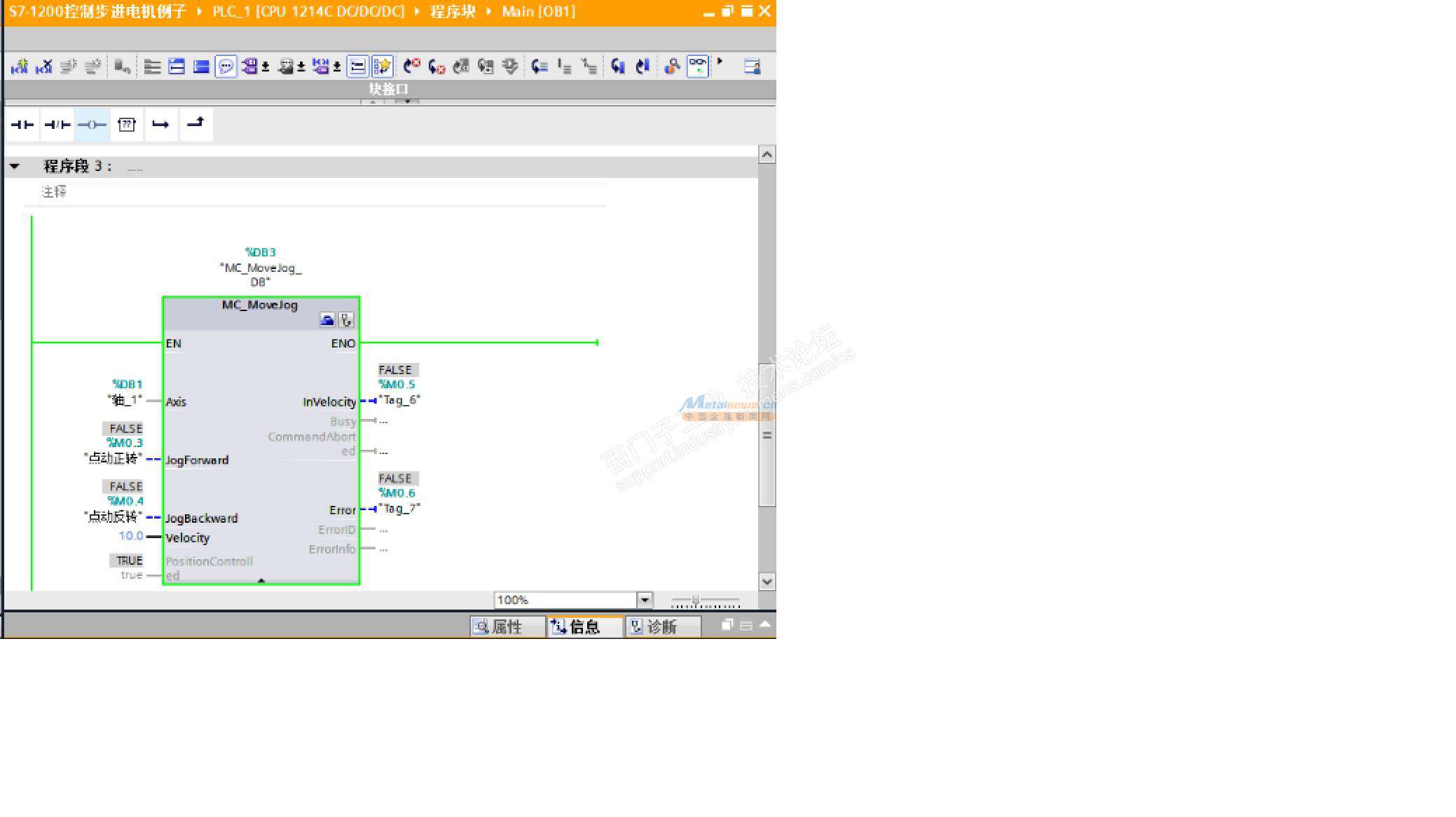
Error = true,说明指令存在错误,给ErrorID管脚写一个变量地址MW2,看结果是什么数据。重新修改程序下载后,点动,ErrorID = 16#8402,F1帮助说是Veloctiy管脚值无效,说明我硬件组态与MC_MoveJog指令没有匹配好,既然该管脚有错误,我改一个数据试试,改为100.0后下载,测试MC_MoveJog指令,没有错误报警了:
为确认Veloctiy管脚范围值,我重新返回到硬件组态的“动态常规”窗口,看到在这里有这个数据的限制,图示: