




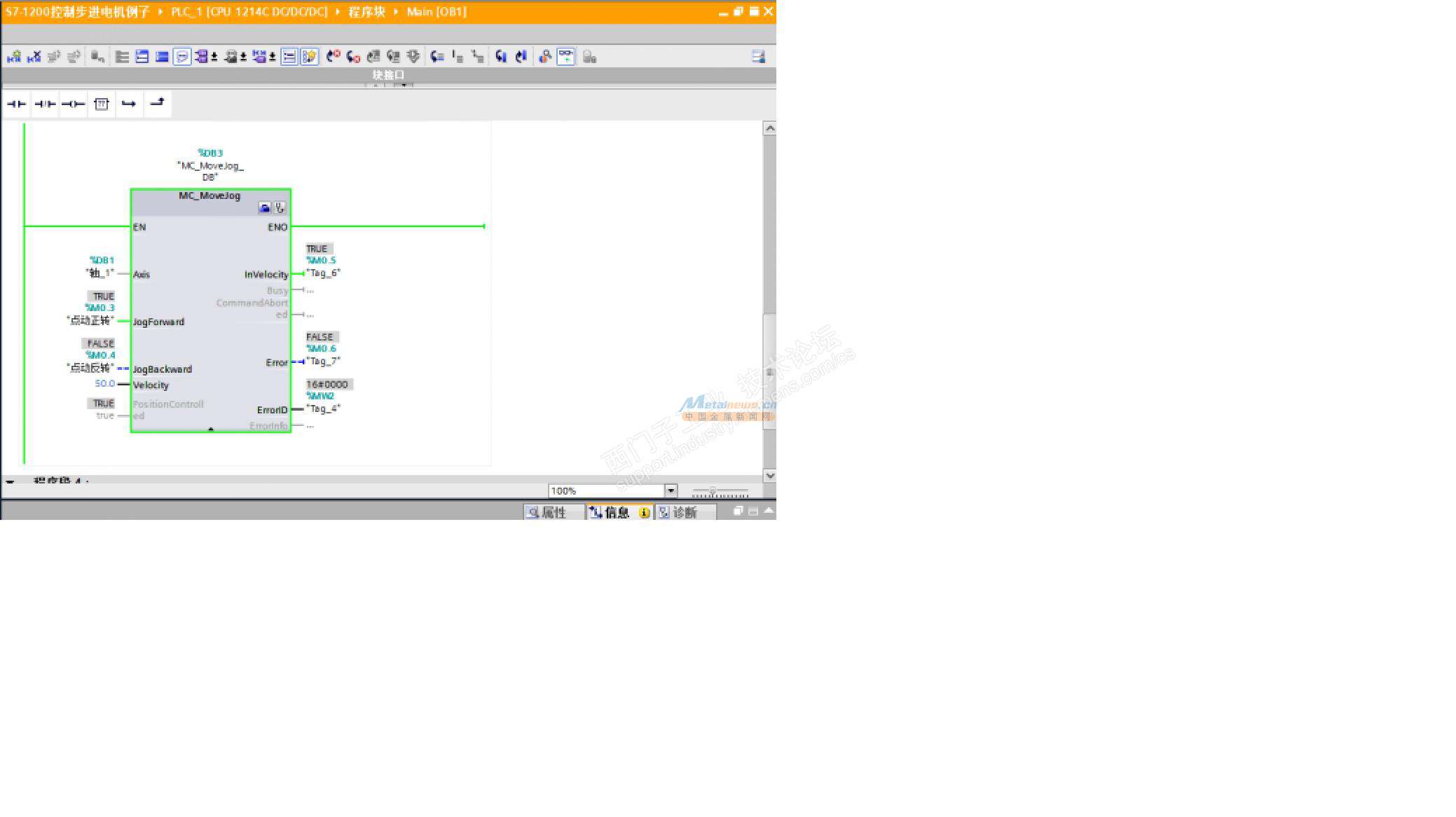
原因找到,Veloctiy管脚范围值填入数据必须大于50.0,重新修改Veloctiy管脚为50.0,下载,使能JogForward(正转)M0.3 = 1,没有出现报警Error的M0.6 = 0,图示:
反正是测试,我索性同时使能M0.3和M0.4,看MC_MoveJog指令会出现什么结果,是具有谁优先?,下载,图示:
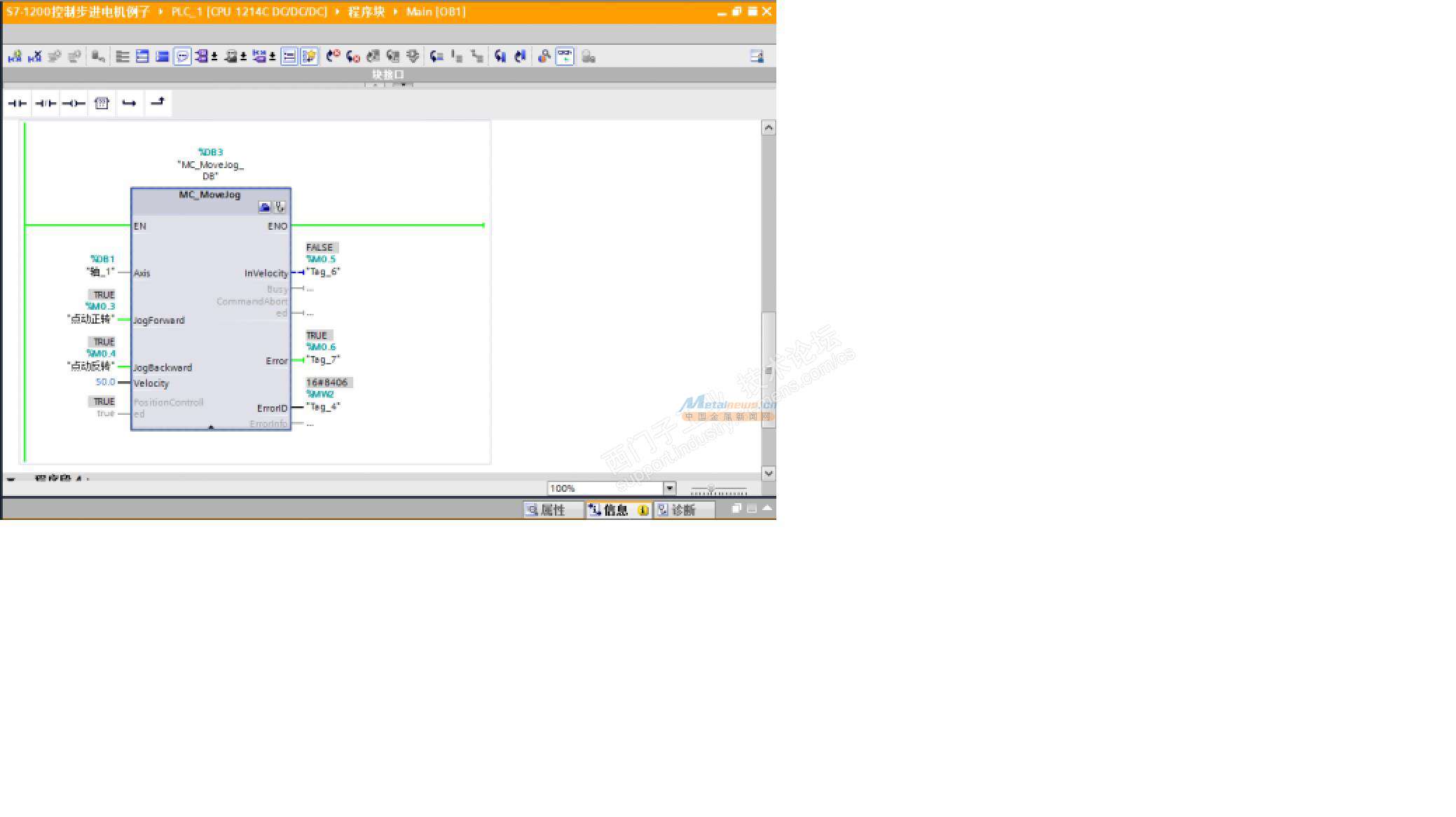
ErrorID管脚出现16#8406错误,F1帮助看说明,图示:

看来这些基本的逻辑关联,指令早已经做完整了。
我在恢复对M0.3/M0.4的操作中又遇到了一个新问题,即我单独复位M0.3或者M0.4时,报警并没有消除,需要将点动正、反转全部复位,既然这样,那我还需要再调用一个指令来试试指令错误时的复位,MC_Reset指令,图示: 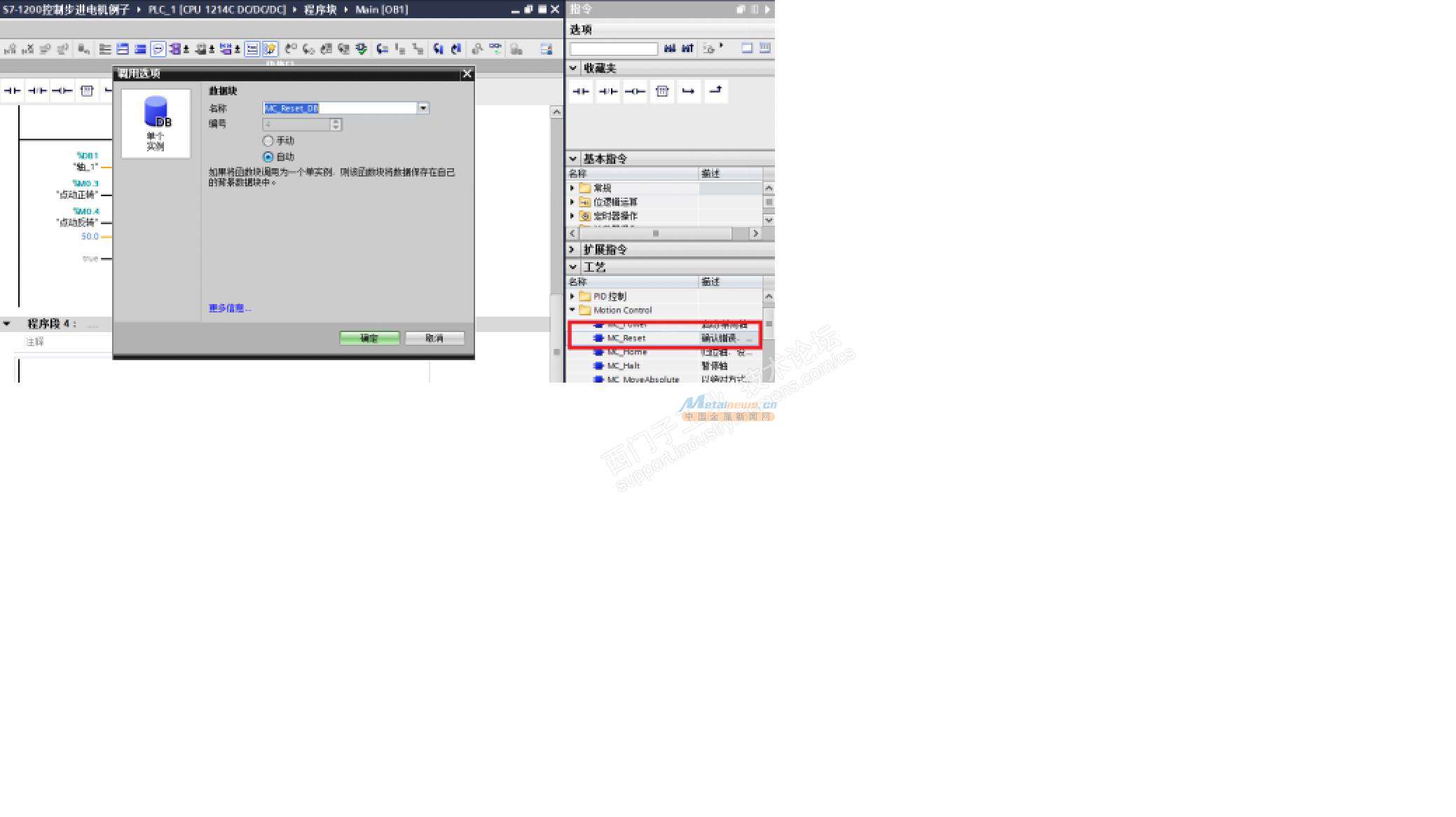
编辑MC_Reset指令,下载,尝试了几次复位,无法复位MC_MoveJog指令ErrorID的错误号,图示:
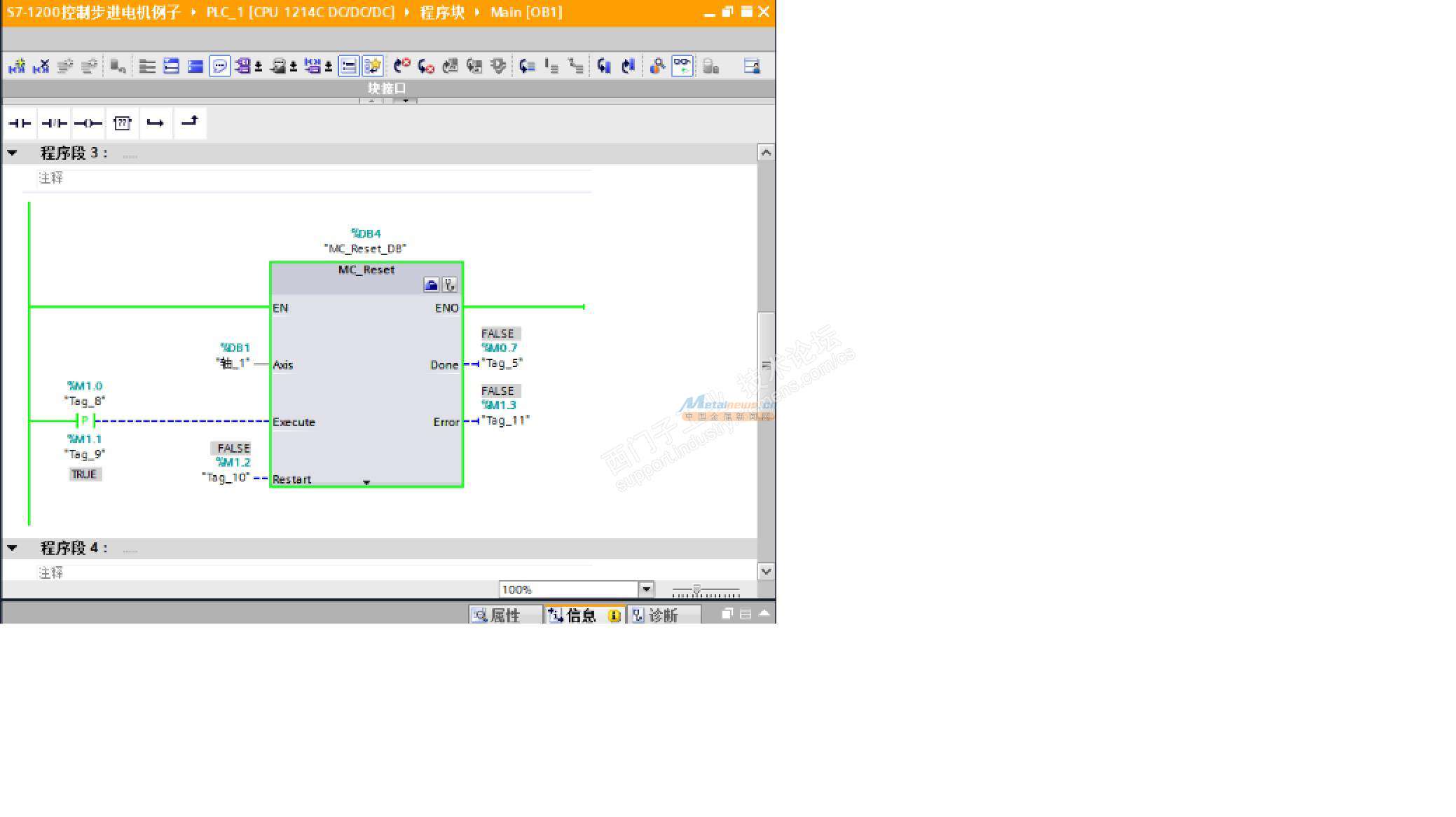
看来复位MC指令错误,并不全是调用MC_Reset指令能够解决问题的。
简单验证测试也只能到此了,待找到导轨丝杆,做一个接近于实际应用项目再测试其它指令。有一点体会的是采用portal软件编辑简易的驱动控制,这个F1帮助是非常有效的,我第一次做这个测试验证项目,基本没有遇到什么瓶颈问题,一旦有错误信息,看F1的帮助很快能够找到问题的所在。
